
 (nur für bestimmte Geräte mit Schnittstelle für GPS-Empfänger, nach Freischaltung)
(nur für bestimmte Geräte mit Schnittstelle für GPS-Empfänger, nach Freischaltung)
Dieses Dokument beschreibt, wie im Terminal Daten von einem externen GPS-Empfänger verarbeitet werden können.
In Geräten wie z.B. MKT-View können GPS-Daten nicht nur mit dem Logger aufgezeichnet werden,
sondern auch in der Applikation für eigene Zwecke verwendet werden.
Nicht alle Geräte sind zum Anschluß eines GPS-Empfängers geeignet - siehe Feature Matrix : "GPS decoder") !
Das hier beschriebene Feature muss vom Hersteller erst freigeschaltet werden,
was i.A. bereits bei der Bestellung erfolgt.
Inhalt
- Anschluss eines GPS-Empfängers ('Maus') am MKT-View
- Übersicht der Funktionen zum Zugriff auf die GPS-Daten :
Position,
Höhe, Datum,
Uhrzeit, Geschwindigkeit,
Qualität, Anzahl Satelliten, ...
- Verarbeitung von GPS-Daten per Script
- Verwendung des 'OnLocationChanged'-Handlers als GPS/CAN-Gateway
-
Überprüfen des Empfängers mit dem GPS-Test im MKT-View
Anhang: Internes Format für Breiten- und Längengrad,
Beispielprogramm
Siehe auch:
Hinweis: Der GPS/NMEA-Decoder im MKT-View ist ein optionales Feature,
welches vor der Verwendung einmal freigeschaltet werden muss.
Er kann allerdings auch ohne Freischaltung (vor dem Kauf) im 'Evaluierungs-Modus' betrieben werden.
Im Evaluierungs-Modus sind die GPS-Koordinaten ungenau, und die Anzeige als Zeichenkette (String)
weist gelegentlich auf den 'Testbetrieb' hin.
Das Freischalten der optionalen Features wird in diesem Dokument beschrieben.
Im Simulator (d.h. Testbetrieb im Programmiertool) funktioniert das Decodieren von NMEA-Zeichenketten immer.
Am PC muss dazu lediglich eine geeignete GPS-Maus am seriellen Port des PCs angeschlossen werden, und dessen
'COM-Port-Nummer' im Programmiertool auf dem Panel
'Einstellungen des Programmiertools' angewählt werden.
Beim Aufruf des Befehls gps.prot="NMEA" verbindet das Programmiertool
den seriellen Port des PCs mit dem GPS-Decoder (NMEA-Parser). Zwischen GPS-Maus und seriellem Port (am PC)
könnte ein einfacher Adapter erforderlich sein, da am üblichen RS-232-Anschluss keine 5 bzw. 12 Volt für
den GPS-Empfänger abgegriffen werden können. Angaben zur Spannungsversorgung des Empfängers entnehmen Sie bitte
dem Datenblatt des Herstellers.
Je nach Hardware (und verfügbarem Platz am Gehäuse) kommen für MKT-View II / III / IV
unterschiedliche Anschlussbuchsen für den GPS-Empfänger verwendet:
- MKT-View II : GPS-Anschluss per 9-poliger SUB-D-Buchse (weiblich am MKT-View, männlich am GPS-Kabel)
- MKT-View III, IV: GPS-Anschluss per 6-poliger 'Telephonbuchse' (bitte nicht mit dem Ethernet-Port verwechseln!!)
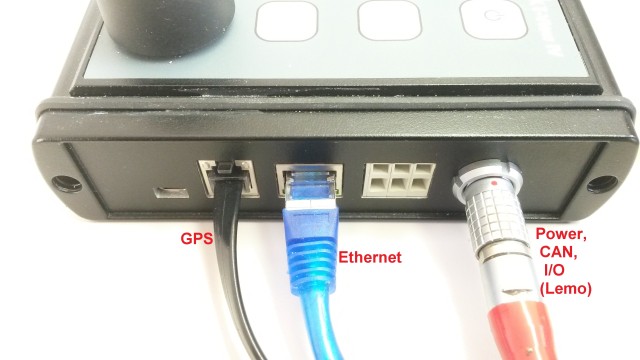
Abbildung 1 : GPS-Anschluss an der rechten Seite vom MKT-View IV
Alle 'GPS-Anschlüsse' führen die Versorgungsspannung für den GPS-Emfänger heraus.
Darum können diese Anschlüsse nicht kompatibel mit einer RS-232-Schnittstelle sein,
auch wenn dies beim MKT-View II 'auf den ersten Blick' der Fall zu sein scheint.
Details zum GPS-Anschluss, inklusive Pinbelegung von Buchse oder Stecker, finden Sie
im gerätespezifischen Datenblatt.
Einige Datenblätter finden Sie auf der mittlerweile online gestellten 'MKT-CD'.
See also: Testing the GPS receiver, Programming Tool, 'A to Z' .
Hinweis: Die im folgenden beschriebenen, noch nicht komplett übersetzten Befehle
zum Zugriff auf den GPS-Empfänger bzw. auf die vom Empfänger gelieferten Werte
werden für eine 'normale' Anwendung nicht benötigt.
Für den normalen Einsatz (mit Aufzeichnung der GPS-Daten per Logger) muss lediglich der passende
Empfängertyp im 'Setup'-Menü eingestellt werden.
Eine der folgenden Auswahlmöglichkeiten sollte für Ihren GPS-Empfänger passen:
None/Off : Es ist kein GPS-Empfänger installiert, der GPS-Port kann für andere Zwecke verwendet werden.
NMEA 4k8 : Ein 'normkonformer' NMEA-0183-Empfänger mit aynchronem seriellen Interface, 4800 Bit/Sekunde.
NMEA 9k6 : Ein NMEA-Empfänger mit 9600 Bits/Sekunde. Entspricht nicht dem Standard, wird aber oft verwendet.
NMEA 19k2: Ein NMEA-Empfänger mit 19200 Bits/Sekunde. Entspricht nicht dem Standard, wird aber gelegentlich verwendet.
"4-Hz"-mouse : Ein proprietärer Empfänger, der (z.B. mit 38400 Bit/Sekunde) vier Positionsmeldungen pro Sekunde liefert.
"10-Hz"-mouse: Ein sehr exotischer Emfänger, der angeblich zehn Positionsmeldungen pro Sekunde liefern sollte (was er nicht tat).
Mit den unten aufgeführten Kommandos kann Ihre Applikation notfalls die im System-Setup eingestellte Auswahl überstimmen.
-
gps.baud
-
Liest oder setzt die Baudrate für den seriellen Port, an dem der GPS-Empfänger
angeschlossen werden soll. Einheit: Bits pro Sekunde. Übliche Werte sind 1200, 2400, 4800,
9600, 19200, und manchmal 38400 (bit/second). Beispiel:
@gps.baud=4800
Setzt die Baudrate für den GPS-Port auf die früher üblichen 4800 Bit/Sekunde.
-
-
gps.prot
-
Dieser Parameter sollte von der Applikation auf das zum GPS-Empfänger passende
Protokoll gesetzt werden. Der zugewiesene Parameter ist eine Zeichenkette (String,
wie bei Strings üblich mit Anführungszeichen umschlossen):
"OFF" = Keine GPS-Daten auf dem seriellen Port (d.h. der Port kann 'für andere Zwecke'
verwendet werden). Dies ist aus den hier erläuterten
Gründen die Default-Einstellung (auch im Programmiertool / Simulator) !
"NMEA" = GPS-Daten werden Form von Textzeilen übertragen, mit einem NMEA-0183-kompatiblen
'Satz' pro Zeile. Details finden Sie in der frei verfügbaren NMEA-0183-Spezifikation.
-
gps.cfg
-
Die Zuweisung eines von Null verschiedenen Wertes an gps.cfg startet eine
spezielle Konfigurationsprozedur, die z.B. für die Initialisierung bestimmter
"4-Hz-" oder "10-Hz-"GPS-Mäuse benötigt wird, um diese zum Senden von 4 bzw 10
Positionsmeldungen pro Sekunde zu motivieren. Für GPS-Empfänger, die nur das Standard-
NMEA-0183-Protokoll verwenden, ist dies nicht nötig (denn normale GPS-Empfänger
beginnen autonom mit dem Senden von Positionsdaten, sobald der Satelliten-Almanach
empfangen wurde).
Für die o.g. "speziellen" GPS-Empfänger verwenden Sie eine formale Zuweisung wie z.B.
gps.cfg=4
(Beispiel zum Initialisieren einer "4 Hz"-Maus).
-
-
gps.da
-
Liefert den aktuellen Tag des Monats (1 bis 31).
Siehe auch: gps.yr, gps.mo, gps.da, gps.hr, gps.mi, gps.se . Alle Funktionen zum
Auslesen von GPS-Datum und -Uhrzeit verwenden UTC (Universal Time Coordinated),
was nahezu mit GMT (Greenwich Mean Time) identisch ist.
Ein GPS-Empfänger liefert immer UTC - nicht Ihre lokale Zeit !
-
-
gps.dstr
-
Liefert das aktuelle (UTC-)Datum als Zeichenkette im Format YYYY-MM-DD
(ISO8601, längerspezifische Formate werden nicht unterstützt) .
-
gps.hasl
-
Liefert die aktuelle Höhe in Metern über dem Meeresspiegel (hasl = height above
sea level).
-
gps.hdop
-
Liefert den aktuellen 'HDOP'-Wert vom GPS-Empfänger. HDOP bedeutet
horizontal dilution of
precision. Je höher der Wert, desto
schlechter ist die Genauigkeit der horizontalen
Position. Werte unter 4 gelten üblicherweise als
"gut", Werte über 8 sind "schlecht". Der HDOP-Wert ist dimensionslos (keine Angabe in Metern).
-
-
gps.hr
-
Liefert die aktuelle Stunde des Tages (Teil von Datum und Uhrzeit in UTC). Wertebereich 0 bis 23.
Siehe auch: gps.tstr (liefert die komplette Uhrzeit als Zeichenkette für die Anzeige).
-
gps.lat_d
-
Liefert den aktuellen Breitengrad als Fliesskommawert in Grad (90°=Nordpol ... -90°=Südpol).
-
gps.lon_d
-
Liefert den aktuellen Längengrad als Fliesskommawert in Grad (0°=Greenwich-Meridian, positiv bis 180°=östliche Länge).
-
gps.lat
-
Liefert den aktuellen Breitengrad als 32-Bit Integer im internen Format (1/100stel Bogensekunden).
-
gps.lon
-
Liefert den aktuellen Längengrad als 32-Bit Integer im internen Format (1/100stel Bogensekunden).
-
gps.mi
-
Liefert die aktuelle Minute (als Teil der Uhrzeit in UTC). Wertebereich 0 bis 59.
-
gps.mo
-
Liefert die aktuelle Monatsnummer (bezogen auf UTC). Wertebereich 1 (Januar) bis 12 (Dezember).
-
gps.mjd
-
Liefert das aktuelle GPS-Datum als Integer-Wert im MJD-Format (Modifiziertes Julianisches Datum).
Das MJD ist zum Speichern und für Berechnungen besser geeignet als die Komponenten
year, month, and day number.
Die Script-Sprache enthält eine Funktion zum Konvertieren von Jahr, Monat, Tag nach MJD,
und die Umkehrfunktion (Zerlegen von MJD in Jahr, Monat, Tag).
Siehe auch: gps.unix_time (favorisiertes Format, liefert Datum und Uhrzeit im Unix-Format).
-
gps.nsat
-
Liefert die Anzahl der für den GPS-Empfänger momentan sichtbaren Satelliten.
Wertebereich 0 bis 12 (bei sehr alten Empfängern maximal 8).
-
gps.pos
-
Ohne zusätzliche Argumente liefert diese Funktion eine Zeichenkette mit der aktuellen Position
im Format Grad-Minuten-Sekunden, z.B.:
52°11'33.2"N 008°35'20.2"E
Dieses Format entspricht der bei vielen GPS-Geräten üblichen 'internationalen' Schreibweise,
mit Breitengrad (latitude, N/S) vor dem Längengrad (longitude, E/W). Einige Empfänger zeigen nur
Grade und (Bogen-)Minuten, aber keine (Bogen-)Sekunden. Für Berechnungen oder zum Aufzeichnen von GPS-Daten
in numerischer Form verwenden Sie stattdessem besser die Funktionen
gps.lat und gps.lon.
-
-
gps.pos( <latitude>, <longitude>)
-
Konvertiert eine Koordinate (mit Breiten- und Längengrad) in eine Zeichenkette,
im oben beschriebenen Format. Aus Kompatibilitätsgründen erwartet diese Funktion
Breiten- und Längengrad als Integer-Werte im internen Format
(hunderstel Bogensekunden). Beispiel:
gps.pos(360000,360000) liefert die Zeichenkette 01°00'00.0"N 001°00'00.0"E
-
gps.rstr
-
Ermöglicht den Zugruff auf die letzte vom seriellen Port empfangene Zeichenkette
(rstr = received string; z.B. NMEA-Satz in ASCII). Diese Funktion
diente primär zu Testzwecken (z.B. um festzustellen, ob und was ein GPS-Empfänger
sendete, wenn keine Position decodiert werden konnte. Ein Empfänger könnte z.B.
statt NMEA-0183-Daten Diagnosemeldungen senden).
Liefert diese Funktion nur unleserliches 'Kauderwelsch', überprüfen Sie die
Baudrate des Empfängers.
-
gps.se
-
Liefert die aktuelle Sekunde (Teil der Uhrzeit in UTC). Wertebereich: 0 bis 59 (abgerundeter Integer).
-
gps.sec
-
Ähnlich wie gps.se (Sekunden der aktuellen Minute), das Ergebnis ist allerdings eine Fliesskommazahl im Bereich 0.0 bis 59.99 (Sekunden).
Bei GPS-Empfängern mit mehr als einer Positionsmeldung pro Sekunde (z.B. der "4-Hz-Maus") steht damit die volle Auflösung zur Verfügung.
-
gps.speed
-
Geschwindigkeit über Grund in km/h (die Geschwindigkeit aus NMEA-0183 in "Knoten" wird intern umgerechnet).
-
-
gps.time
-
Aktuelle Tageszeit (in UTC), gemessen in Sekunden ab Mitternacht, als Fliesskommazahl.
Bei Empfängern, die nur eine Positionsangabe pro Sekunde liefern, liefert diese Funktion immer eine ganze Zahl (volle Sekunde).
-
gps.tstr
-
Liefert die aktuelle Uhrzeit als Zeichenkette im Format hh:mm:ss .
-
gps.unix_time
-
Liefert eine Kombination aus GPS-Datum und -Uhrzeit als 'Unix-Zeit'
(Anzahl seit dem 1. Januar 1970, 00:00:00 UTC verstrichener Sekunden).
Das Ergebis ist ein 64-Bit 'double precision'-Wert, der z.B. direkt mit der
per system.unix_time auslesbaren Systemzeit verglichen werden kann
um die Abweichung zwischen batteriegepufferter Echtzeituhr und der vom GPS-Empfänger gelieferten Zeit
zu ermitteln.
-
gps.ustr
-
Liefert den letzten unerkannten String von der seriellen Schnittstelle,
d.h. üblicherweise einen NMEA-Satz, den der Standard-NMEA-Parser nicht zuordnen konnte.
(manche Empfänger senden Zeilen mit Schlüsselwörtern, die nicht in NMEA-0183
spezifiziert sind).
-
gps.yr
-
Liefert die aktuelle Jahreszahl vom GPS-Empfänger. Wertebereich 2000 ... 2099.
Seit 2017 können Daten vom GPS-Empfänger auch direkt in der Script-Sprache verarbeitet werden.
Die Syntax ist mit der im vorhergehenden Kapitel vorgestellten Befehlen (für den Display-Interpreter) kompatibel.
Einige Script-spezifische Erweiterungen, z.B. das Auslesen von Längen- und Breitengrad als Fliesskommawerte mit 'doppelter
Präzision' (64 Bit) werden in diesem Kapitel anhand einfacher Beispiele vorgestellt.
Um in der Applikation sehr schnell auf 'neue' GPS-Daten zu reagieren (ohne 'Polling'), kann im Script
eine parameterlose Prozedur namens 'OnLocationChanged' definiert werden. Ist diese vorhanden, wird sie
jedesmal vom System aufgerufen, wenn ein kompletter Block von NMEA-Sätzen (i.A. "$GPRMC" oder / und "$GPGGA")
von der seriellen Schnittstelle empfangen wurde. Beim Aufruf liegen dann bereits die aktuellen Daten vor,
und können wie im folgenden Beispiel aus dem Funktionsblock 'gps' ausgelesen werden.
Abhängig vom verwendeten GPS-Empfänger (und dessen Konfiguration) wird 'OnLocationChanged' ein bis zehn mal
pro Sekunde aufgerufen; bei speziellen GPS-Empfängern noch häufiger.
Der folgende Ausschnitt des Scripts aus programs/GPS_test.cvt demonstriert zwei Möglichkeiten,
um Daten vom GPS-Empfänger auf dem CAN-Bus auszugeben:
- 'fest verdrahtetes' Umkopieren von GPS-Daten in CAN-Messages, inkl. Senden per Script
- Per Datenbank (hier: programs/GPS_to_CAN.dbc) gesteuertes Zusammensetzen der CAN-Signale
proc OnLocationChanged() // Handler wird bei jeder neuen GPS-Position aufgerufen
local tCANmsg msg;
// 'Fest verdrahtetes' Senden von GPS-Data per CAN-Bus:
msg.id := 0x501; // CAN message id for 1st part of the GPS data
msg.len := 8; // data length code (number of data bytes)
msg.f64[0] := gps.lon_d; // longitude in degrees as 64-bit 'double'
can_transmit( msg ); // send CAN message
msg.id := 0x502; // CAN message id for 2nd part of the GPS data
msg.len := 8; // data length code (number of data bytes)
msg.f64[0] := gps.lat_d; // latitude in degrees as 64-bit 'double'
can_transmit( msg ); // send CAN message
msg.id := 0x503; // CAN message id for 3rd part of the GPS data
msg.len := 8; // data length code (number of data bytes)
msg.f64[0] := gps.unix_time; // seconds since 1970-01-01 00:00:00.0 UTC
can_transmit( msg ); // send CAN message
// - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
// Alternative: GPS-Daten in *Display-Variable* kopieren (s.U.).
// Den Rest (Senden per CAN) erledigt die Firmware, wenn die ent-
// sprechenden Variablen durch Import einer CAN-Datenbank (*.dbc)
// als *zu sendendende CAN-Signale* konfiguriert wurden.
// (Quelldatei : programs/GPS_to_CAN.dbc) .
// Variablen mit einem Sendeintervall ("Update Time") von NULL
// werden 'ereignisgesteuert' gesendet, d.h. immer dann, wenn sich
// bei der folgenden Zuweisung *der Wert* geändert hat.
// Dadurch wird das CAN-Sende-Intervall durch die Frequenz der
// '$GPRMC'- oder '$GPGGA'-Sätze vom GPS-Empfänger bestimmt.
// - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
display.GpsLat := gps.lat_d; // Breitengrad (°)
display.GpsLon := gps.lon_d; // Längengrad (°)
display.GpsTime := gps.time; // Anzahl Sekunden seit Mitternacht
display.GpsDate := gps.mjd - 40587; // Anzahl TAGE seit UNIX-Epoche (1. Januar 1970)
display.GpsSpeed := gps.speed; // Geschwindigkeit in km/h (!)
display.GpsHeight := gps.hasl; // Höhe über Meeresspiegel (m)
display.GpsUnixSeconds := gps.unix_time + 0.0001; // 64-bit 'double',
// plus 0.1 Millisekunde zum Testen der *Auflösung* des CAN-Signals
endproc; // OnLocationChanged
Die hier beschriebene Funktion ist kein Ersatz für eine 'hübsche' GPS-Koordinaten-Anzeige.
Sie dient nur für einen 'schnellen' Test des GPS-Empfängers, ohne dass eine spezielle
Test-Applikation in das programmierbare Gerät geladen werden muss.
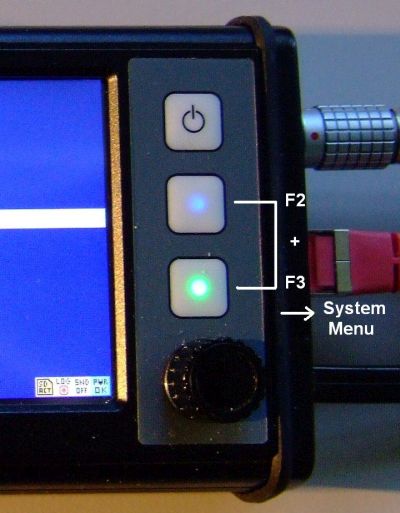
Der GPS-Test wird wie unten gezeigt über das 'System-Menü' aufgerufen.
Sollte der Empfänger nicht bereits vorher (per Setup oder Applikation) gestartet worden sein,
oder die falsche Baudrate / das falsche Protokoll eingestellt sein, rufen Sie die
passende Initialisierung im unten abgebildeten Testmenü aus.
Die aktuelle Position (mit Längen- und Breitengrad in Grad, Minuten, Sekunden),
Datum und Uhrzeit in UTC (=GPS-Zeit), Geschwindigkeit in km/h,
Höhe über Meeresspiegel in Metern, Anzahl momentan sichtbarer Satelliten,
Signalqualität und HDOP (Horizontal Dilution Of Precision, bedeutet ungefähr "Verringerung der Genauigkeit")
werden auf dem Bildschirm angezeigt:
|
→
|
Main system menu (9)
EXIT !
Load program from FILE
Transfer via CAN = OFF/Auto
Other transfers ... ▶
Audio Recorder
CAN snooper mode
CAN logger config
User Settings
System Setup / Unlock
System Test → GPS Receiver
Network Setup
Diagnostics
General Settings
...
|
|
→
|
GPS Receiver Test
F1 : Init receiver for 9k6, NMEA .
F2 : Init receiver for "4-Hz"-mouse .
F3 : Quit
GPS baudrate = 38400
Protocol = 1 (NMEA)
GPS decoder output :
SampleIdx = 12345 ← Anzahl empfangener NMEA-Sätze
Pos = 52°11'33.1"N 008°35'20.0E
UTC = 2016-11-07 17:00:00
Speed= 0.3km/h Height= 80.5m(ASL)
Qual=2 NSats=11 HDOP= 0.9 ← Qualität, Anzahl Satelliten,..
Rx= $GPGGA, ..... ← zuletzt empfangener NMEA-Satz
|
|
(Integrierter GPS-Empfänger-Test, hier im MKT-View IV)
Ein ähnlicher Test kann auch in Ihre Applikation integriert werden. Ein Beispiel dazu finden Sie im Anhang .
Tipp: Der GPS-Empfänger kann zu Testzwecken auch an den PC angeschlossen werden. Der im Programmiertool enthaltene Firmware-Simulator übernimmt dann
das Decodieren der NMEA-Sätze. Ferner können die NMEA-Sätze im "Rohformat" ($GPRMC, $GPGGA, ..) im Programmiertool auf der Registerkarte
'Fehler und Meldungen' angezeigt werden. Setzen Sie dazu den Haken vor der Option 'Meldungen aktivieren von ...' / 'Andere Protokolle'.
Anhang
Einge der oben aufgelisteten Interpreter-Funktionen liefern den aktuellen Breiten- und Längengrad
als 32-Bit-Integer-Wert (kein Fliesskomma).
Die Einheit ist eine hundertstel Bogensekunde (1/100 arc seconds)
(*). Dabei sind..
-
positive Breitengrade NÖRDLICH, negative Breitengrade SÜDLICH des Äquators
-
positive Längengrade ÖSTLICH(!), negative Längengrade WESTLICH des Greenwich-Meridians ("0°").
Um die aktuelle Position in diesem Format zu lesen verwenden Sie die Funktion
gps.lat (latitude, Breitengrad) bzw. gps.lon (longitude, Längengrad).
.
(*) Dies ist die Auflösung, nicht die Genauigkeit:
0.01 Bogensekunden entsprechen einer räumlichen Auflösung von etwa 30 cm auf der Erdoberfläche,
was weit jenseits der Genauigkeit von handelsüblichen GPS-Empfängern (ohne DGPS) liegt.
Nach der Installation des Programmiertools finden Sie in der Applikation programs/GPS_test.cvt
ein Beispiel zur Anzeige von GPS-Daten auf einer programmierbaren Anzeigeseite.
Auf der oben gezeigten Seite der Beispiel-Applikation werden die wichtigsten 'Messwerte'
(vom GPS-Empfänger), und zusätzlich die Konfigration des NMEA-Decoders angezeigt.
Der GPS-Empfänger befand sich dabei auf der Fensterbank innerhalb eines Gebäudes.
Die Funktion "gps.rbuf" lieferte in diesem Beispiel noch keinen kompletten NMEA-Satz.
Dies ist kein Fehler sondern der Zweck dieser Funktion: Sie liefert den aktuellen Inhalt des
Empfangspuffers (als Zeichenkette), auch bevor der "Satz" (hier: $GPGGA) komplett empfangen wurde.
Der letzte komplett empfangene NMEA-Satz wird per "gps.rstr" abgefragt.
Die GPS-Konfigurationsparameter (Baudrate und
Protokoll) wurden in diesem speziellen Beispiel im
'page-enter'-Event eingestellt, so dass diese unabhängig von den Einstellungen
im System-Setup sind.
Neben der Anzeige der aktuellen GPS-Daten sendet die Beispielapplikation auch einige
GPS-Daten per CAN-Bus. Die Daten (Position, Uhrzeit, Datum, Geschwindigkeit, Höhe)
können von allen CAN-Knoten empfangen und angezeigt oder weiterverarbeitet werden,
z.B. mit der Applikation programs/GPS_from_CAN.cvt (ebenfalls im Installationsarchiv enthalten).
Die Telegrammstruktur ist wie üblich in einer Datenbank für CAN definiert (programs/GPS_to_CAN.dbc).
Die selbstdefinierten Signale (GpsLat, GpsLon, GpsTime, GpsDate, GpsSpeed, GpsHeight) wurden in der
Applikation GPS_test.cvt als zu sendende Signale aus der Datenbank importiert;
in der Applikation GPS_from_CAN.cvt werden die gleichnamigen Signale empfangen.
Details zum Senden von Signalen, die in einer CAN-Datenbank (*.dbc) definiert sind,
finden Sie hier.
Die Struktur der von diesem 'GPS→CAN-Gateway' gesendeten Telegramme kann selbstverständlich
für eigene Anwendungen geändert oder erweitert werden. Wir empfehlen dazu einen geeigneten DBC-Editor,
z.B. von Kvaser (Kvaser Database Editor).
Datei: ..?..\uptwin1\help\gpsdec_49.htm
Autor: W.Büscher, MKT Systemtechnik
Stand: 2017-08-15 (ISO8601, YYYY-MM-DD)
zurück zum Seitenanfang