

- Note
-
So far (2025), only the MKT-View V (successor of the MKT-View III and MKT-View IV)
supported CAN FD. Due to the (un-)availability of the intended CPU
(Cortex-M4 with 2 MByte internal Flash, 1 MByte internal RAM, 480 (??) MHz CPU
clock, 2 * CAN/CAN FD, and integrated graphic controller) caused
a severe delay of the development (which already started in 2019).
Alternatively, a system based on NXP's i.MX "crossover" processor was
evaluated, with 600 MHz CPU clock but unfortulately only one CAN FD
interface, plus one 'normal' CAN interface. That CPU was phased out in favour
of an STM32H745 with two internal, CAN FD capable controllers,
plus two extra CAN / CAN FD controllers connected via SPI internally (MCP2518FD).
Properties of the new device (MKT-View V) concerning CAN-FD:
- Four CAN interfaces, usable for CAN as well as CAN FD
- Due to the transceiver hardware, maximum bitrate 4 MBit/sec for CAN FD; 1 MBit/sec for CAN
- Due to the connection between "CAN3", "CAN4" and the CPU via SPI (internal serial interface),
lower maximum throughput than on "CAN1" and "CAN2".
- up to 8 bytes per message for CAN, up to 64 bytes per message for CAN FD
- ideally two times faster than their predecessors (MKT-View III / IV),
if the semiconductor manufacturer's "advertised" 480 MHz core clock become reality;
or three times faster than MKT-View III / IV, if another manufacturer's
Cortex-M7 with 600 MHz clock, CAN FD, and integrated display controller 'wins the race'.
(That 'alternative' CPU was just too bugged to be useful, thus the project
was abandoned after the prototype / evaluation phase).
- Concerning programming, and script language,
the MKT-View V is compatible with MKT-View II / III / IV.
See also:
Configuration of the PC's CAN(/CAN-FD) interface,
Selection of the 'flexible' (high) Bitrate for CAN FD,
Data type tCAN_FD_msg (with 64-byte data field) in the script language,
'Feature Matrix' with similar programmable displays with CAN bus interface(s).
The device profile (saved along with the application) contains a list of CAN ports that
are 'principally' capable of CAN FD. The "list" is actually a bitwise combination,
where bit 0 represents the 'CAN FD capability' of "CAN1", bit 1 represents "CAN2", etc.
The current setting can be checked in the programming tool on the Settings tab,
under Terminal constants, settings, non-volatile values.
In the table, scroll down to CAN FD capable ports. The value shown in the
right columns shows all CAN ports that are principally suited for CAN FD,
even though the programming tool doesn't know which transceiver (chip) is actually
populated on the board:
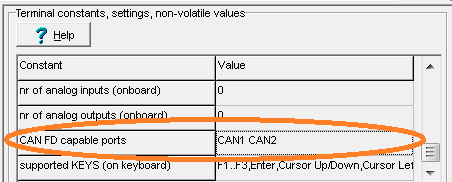
Checking the list of the device's CAN FD capable ports in the programming tool.
(this is for devices not populated with the controllers for "CAN3" and "CAN4")
If re-selecting the device / display doesn't
properly update the list of FD-capable ports, you can fix it manually by clicking
into the table shown above (cell showing "none" / "keine" / "CAN1", etc).
The programming tool will prompt you with a numeric input dialog, where the
bitwise combined value can be entered in decimal notation:
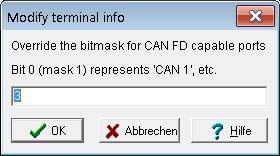
Modifying the list of 'CAN FD capable ports' in the programming tool.
This constant originates from the tool's built-in device database,
and may need to be modified as explained below, e.g. when migrating
from an MKT-View III (not FD capable) to an FD-capable MKT-View V .
Each bit in the decimal value represents one of up to four CAN ports.
Bit 0 (mask 1) represents "CAN FD support on CAN1",
Bit 1 (mask 2) represents "CAN FD support on CAN2",
Bit 2 (mask 4) represents "CAN FD support on CAN3" - even though there's no such hardware yet,
Bit 3 (mask 8) represents "CAN FD support on CAN4" - if there will ever be a controller with FOUR CAN FD interfaces.
The programming tool only allows configuring the
flexible data rate (CAN FD speed after the "bitrate switch")
for all ports that it thinks are CAN FD capable, i.e. with the
corresponding bit set in the parameter shown above.
The Simulation in the programming tool allows transmitting
CAN FD frames (with up to 64 data bytes) only on FD capable ports,
according to the device profile - regardless of the
PC's CAN interface supporting CAN FD or not.